
Planetary Gearbox Design Guide: EV, Robotics & Aerospace Applications Compared
Three industries are pushing planetary gearbox design in fundamentally different directions. Electric vehicles demand single-stage efficiency above 97% at motor input speeds of 12,000–20,000 RPM. Robotic joints need backlash below 3 arcminutes in a package small enough to fit inside a 40 mm housing. Aerospace turbofan engines route 12–24 MW of shaft power through a single epicyclic gear set that must exceed 100,000 flight hours between overhauls. The architecture is the same — sun gear, planet gears, ring gear, carrier — but the design priorities diverge so sharply that a gearbox optimized for one application would fail in the other two.
This guide compares planetary gearbox requirements across EV, robotics, and aerospace, covering gear ratios, material selection, precision grades, and the engineering trade-offs that drive each design decision.
Planetary Gearbox Fundamentals
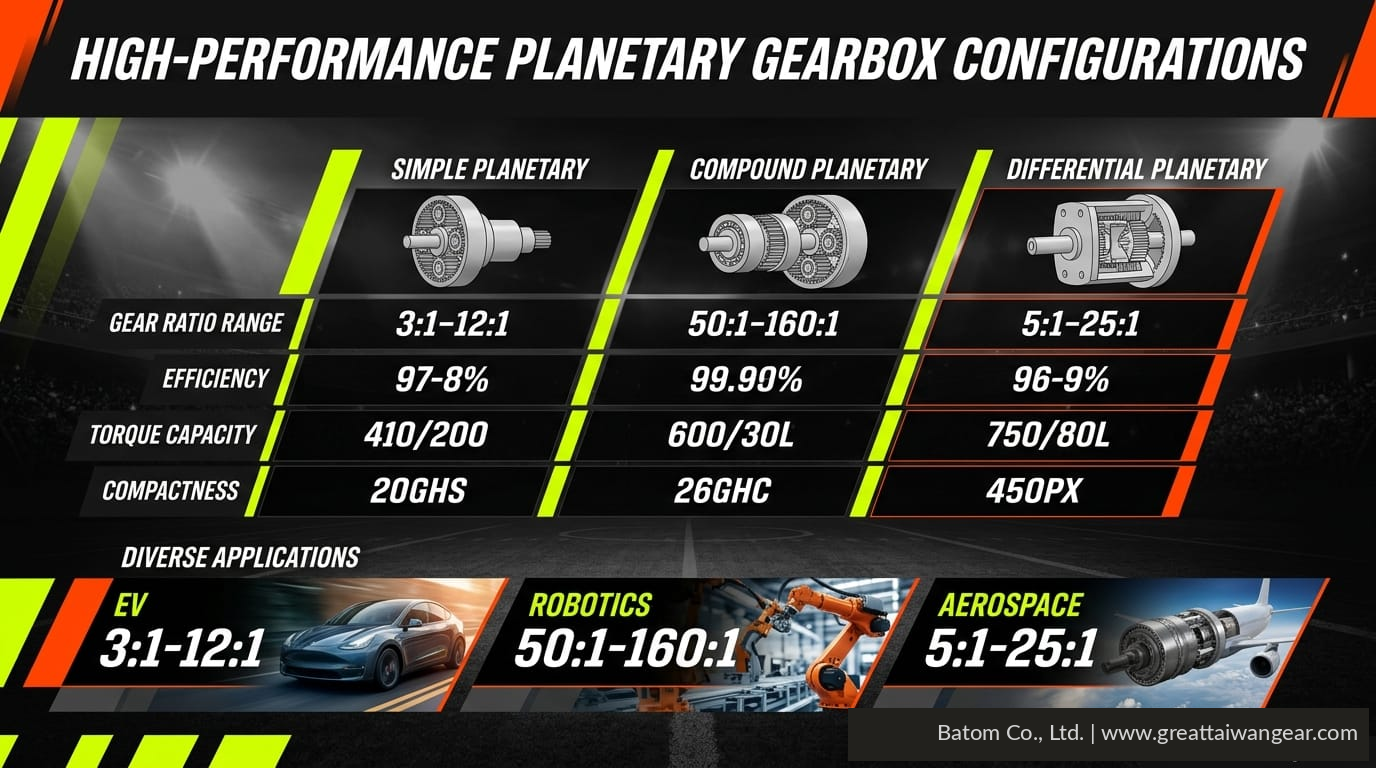
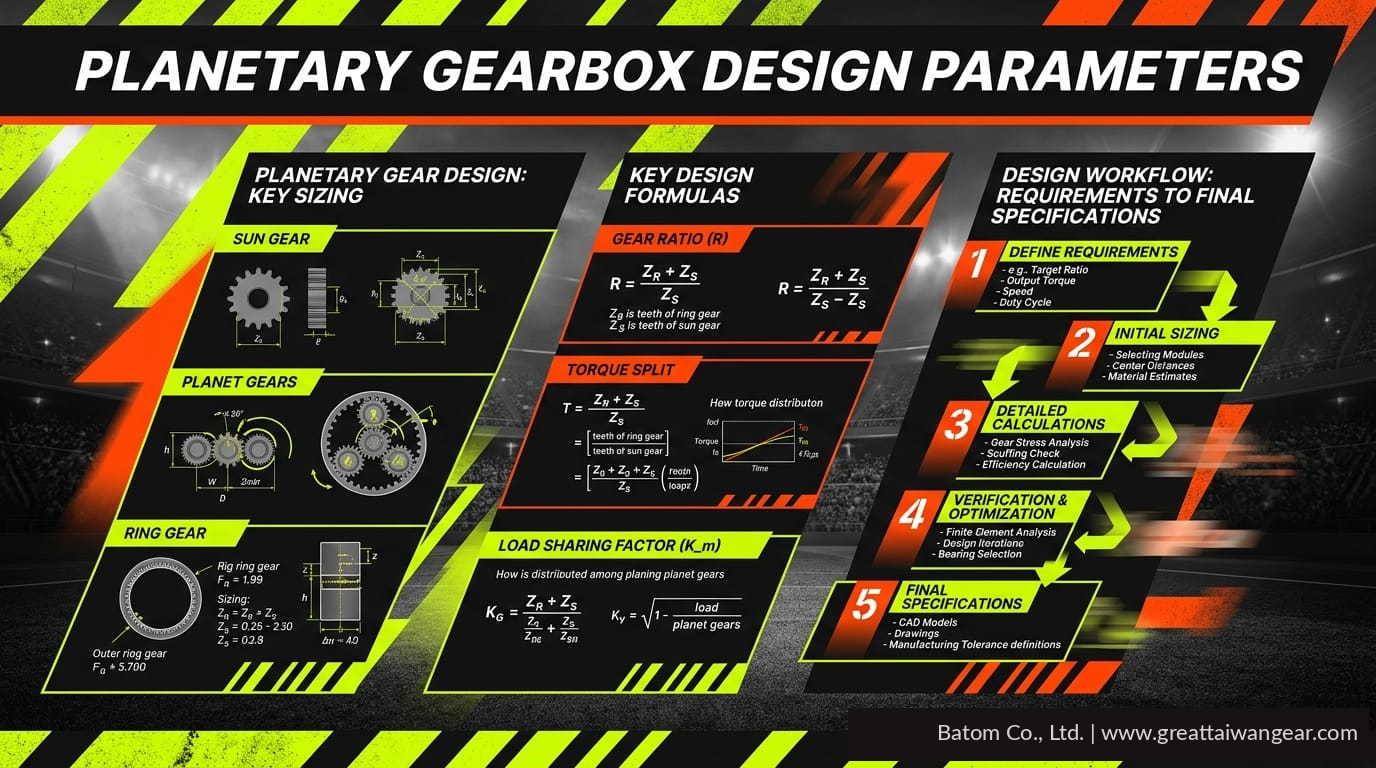
A planetary (epicyclic) gearbox distributes torque across multiple planet gears meshing simultaneously with a central sun gear and an outer ring gear. When the ring gear is fixed and the sun gear drives the input, the carrier rotates at the output with a reduction ratio of i = 1 + Z_ring/Z_sun. A 48-tooth ring paired with a 16-tooth sun produces a 4:1 reduction in a single stage. Practical single-stage ratios range from 3:1 to 12:1. Multi-stage compounds stack two or three planetary stages in series, reaching 160:1 or higher for robotic joint drives.
The coaxial layout — input and output share the same centerline — is the primary structural advantage. Compared to parallel-axis gearboxes, planetary designs deliver 2–3 times the power density per unit volume, weigh 20–40% less for equivalent torque capacity, and cancel radial bearing loads through symmetric planet placement. AGMA 6123-C16 provides the standard design methodology for enclosed epicyclic drives, covering load distribution factors, planet-phase relationships, and allowable stress calculations that underpin all three application domains.
EV Planetary Gearboxes: Efficiency Meets Silence
Electric motors produce peak torque from 0 RPM across a wide speed range, eliminating the need for multi-ratio transmissions in most production EVs. A single-speed planetary reducer multiplies motor torque by the gear ratio while reducing shaft speed to wheel-appropriate RPM. Tesla Model 3/Y uses a 9.03:1 rear-axle ratio, converting 18,000 RPM motor speed into roughly 2,000 RPM at the wheels with over 2,600 Nm of output torque. Rivian R1T/R1S specifies a higher 12.6:1 ratio for stronger low-speed torque biasing, producing 610+ lb-ft combined output from dual motors.
The Porsche Taycan introduced the first production two-speed EV planetary transmission. First gear at 15:1 delivers approximately 12,000 Nm of wheel torque for launch acceleration — 15 motor revolutions per wheel revolution. Second gear at 8:1 matches conventional single-speed ratios for highway efficiency. The shift event uses a "shift overboost" strategy that maintains power continuity through the transition, enabling both sub-3-second sprints and 260 km/h top speed from the same drivetrain.
NVH performance is the defining design constraint for EV planetary gearboxes. Without engine combustion noise to mask gear mesh frequencies, whine and whirring become audible to occupants. Design countermeasures include helical teeth with 15–25° helix angles for smoother meshing, gear tooth accuracy at DIN 5–7 (AGMA A4–A6) class (surface roughness Ra 0.8–1.6 µm), post-carburizing grinding to correct heat-treat distortion, and low-viscosity synthetic lubricants formulated for damping. The mesh frequency spectrum — motor RPM multiplied by tooth count multiplied by planet count — must be mapped against cabin resonance modes during the NVH validation phase.
eAxle integration packages the motor, inverter, and planetary gearbox into a single module for front or rear axle installation. The Austrian HeAD project demonstrated a 24,000 RPM, 140 kW eAxle with 15.04:1 planetary reduction producing 3,020 Nm axle torque at just 65 kg system mass. Material choices for EV planetary gears center on case-hardened steels — AISI 9310, 18CrNiMo7-6, or 16MnCr5 — carburized to 58–62 HRC surface hardness with core toughness maintained at 27–43 HRC (optimized per application). Shot peening adds compressive surface stress that extends bending fatigue life by 20–40%.
Robotics Planetary Gearboxes: Precision in a Compact Package
Robot joint drives choose between three reducer architectures: strain wave (strain wave gear), cycloidal, and planetary. Strain wave gears achieve backlash below 0.5 arcminutes but operate at only 65–75% efficiency and cost USD 800–3,000 per unit. Cycloidal reducers reach sub-1-arcminute backlash at 70–80% efficiency. Planetary gearheads offer the highest efficiency (85–95%) and lowest cost (USD 50–300) but require engineering effort — wave spring preloads, precision needle bearings, and ISO 5–6 grade manufacturing tolerances — to push backlash below 3 arcminutes for precision applications.
Servo motors driving robotic joints typically operate at 3,000–6,000 RPM with continuous power between 100 W and 750 W. A 40 mm planetary gearhead weighing 150 grams can multiply servo output to 50 Nm, achieving a torque-to-weight ratio of 333 Nm/kg. Neugart (Germany) offers precision planetary gearheads from 3:1 to 512:1. Apex Dynamics (Taiwan) provides the MGO series with 5–10 arcminute backlash for industrial automation. For ultra-precision positioning, Harmonic Drive Systems Inc. and Nabtesco cycloidal units remain dominant in 6-axis industrial robot wrists.
Collaborative robots (cobots) add safety constraints defined by ISO/TS 15066: transient contact force limits of 150 N at the arm and 120 N at the wrist. The planetary gear ratio ensures that motor torque at the output cannot exceed these thresholds during unintended contact. Hollow-shaft designs route cables through the gearbox center bore (6–16 mm diameter), enabling integrated wiring for cameras, force sensors, and pneumatic grippers at the robot wrist. Typical design life targets 5,000-20,000 operating hours for factory cobots, with lubrication service intervals every 2,000–5,000 hours.
Stiffness is a critical — and often underappreciated — parameter. Planetary gearheads deliver 2,000–5,000 Nm/arcmin of torsional stiffness, providing rigid positioning under load. Strain wave gears are intentionally compliant at 500–1,500 Nm/arcmin, absorbing collision energy for safety. The choice between stiff and compliant gearboxes directly affects both positioning accuracy and force-control behavior in the robot's control algorithm.
Aerospace Planetary Gearboxes: Reliability at Any Cost
The Pratt & Whitney PW1000G geared turbofan (GTF) represents the most demanding planetary gearbox application in production. The epicyclic gear set sits in the main power path between the low-pressure turbine and the fan, reducing turbine speed from approximately 10,000 RPM to fan speed of 520 RPM at a ratio of roughly 3:1. Power throughput ranges from 12 MW to 24 MW depending on the engine variant (15,000–34,000 lbf thrust). By decoupling fan and turbine speeds, the GTF achieves 16–20% lower fuel burn compared to direct-drive turbofans — the single largest efficiency gain in commercial aviation propulsion in decades.
Material specifications reflect the zero-tolerance reliability requirement. Pyrowear 53 (AMS 6308) is the primary gear steel, sustaining 58–63 HRC surface hardness at continuous operating temperatures up to 150°C with superior fatigue resistance. M50NiL (AMS 6278) serves critical case-hardened aerospace gear applications, with case hardness typically 60–64 HRC and a nickel-bearing core retained at HRC 40–48 for toughness. Case depth runs 1.0–1.3 mm — deeper than EV or robotics gears — with vacuum carburizing followed by oil quench and multiple tempering cycles. Shot peening boosts fatigue life an additional 30–50%. Surface finish targets DIN 4–6 (AGMA A3–A5) class (Ra below 0.4 µm), achieved through precision grinding after heat treatment.
Helicopter main-rotor transmissions use multi-stage planetary configurations to reduce twin-turboshaft engine speeds from approximately 20,900 RPM to main-rotor speed of 350 RPM — an overall ratio exceeding 400:1 across three to four planetary stages. Output torque reaches 50,000–100,000 Nm. Satellite actuator gearboxes face vacuum lubrication challenges: conventional mineral oils evaporate in space, requiring perfluorinated polyether (PFPE) lubricants like Krytox with vapor pressures below 10⁻⁹ torr and operating ranges from −100°C to +200°C.
Certification standards — DO-160G for environmental testing, MIL-STD-810H for military requirements, and AS9100 for quality management — require full material traceability from ingot to finished component, nondestructive testing via ultrasonic and eddy-current inspection, and endurance testing at maximum load and temperature for 500–1,000 hours. Design safety factors of 4–6× on contact stress are standard. MTBF targets exceed 100,000 flight hours for commercial GTF engines and 40,000 flight hours for helicopter transmissions.
Cross-Application Comparison
| Parameter | EV (Single-Speed) | Robotics | Aerospace (GTF) |
|---|---|---|---|
| Gear ratio | 7.5:1–10:1 | 10:1–160:1 | 3:1 |
| Input speed | 12,000–20,000 RPM | 3,000–6,000 RPM | 2,147 RPM |
| Output torque | 2,000–3,500 Nm | 20–200 Nm | 50,000+ Nm |
| Efficiency | >97% | 85–95% | >98% |
| Backlash tolerance | 10–30 arcmin | <3 arcmin | <1 arcmin |
| Gear quality class | DIN 5–7 (AGMA A4–A6) | DIN 5–6 (AGMA A4–A5) | DIN 4–6 (AGMA A3–A5) |
| Module | 2–4 mm | 0.5–2 mm | 3–8 mm |
| Gear material | AISI 9310, 18CrNiMo7-6 | AISI 9310, 16MnCr5 | Pyrowear 53, M50NiL |
| Surface hardness | 58–62 HRC | 58–62 HRC | 58–63 HRC |
| Surface finish (Ra) | 0.8–1.6 µm | 0.4–0.8 µm | <0.4 µm |
| Weight sensitivity | High | Medium | Critical |
| Design life | 10–15 years | 5,000–15,000 hrs | 25,000 flight hrs |
| Cost sensitivity | Extreme | Medium | Low |
| Primary standard | AGMA 2001, ISO 6336 | ISO 6336, DIN 3990 | DO-160, MIL-STD, AS9100 |
Design Trends Shaping the Next Decade
Three trajectories are reshaping planetary gearbox engineering. In EVs, next-generation motors targeting 25,000–30,000 RPM are driving research into titanium and silicon-nitride (ceramic) planet gears that reduce centrifugal loads at extreme speeds. Vacuum carburizing with high-pressure gas quenching is becoming the default heat treatment for high-volume EV gears, offering ±0.1 mm case-depth repeatability in single-piece-flow processing.
In robotics, integrated motor-gearbox modules — where the servo motor, planetary reducer, encoder, and controller ship as a single plug-and-play unit — are simplifying joint assembly. Maxon (Switzerland) and Faulhaber (Germany) lead this trend with coreless motor plus micro-planetary combinations as small as 20 mm diameter.
In aerospace, additive manufacturing is producing titanium gearbox housings 30–40% lighter than traditional castings, with integrated cooling channels and bearing pockets impossible to machine conventionally. Digital twin simulation reduces physical prototyping by 40–60%, accelerating design validation while cutting development costs. The gears themselves still require conventional hobbing, heat treatment, and grinding — precision demands that additive manufacturing cannot yet match.
References
- AGMA 6123-C16 — Design Manual for Enclosed Epicyclic Gear Drives
- ISO 6336 — Calculation of Load Capacity of Spur and Helical Gears
- SAE International — EV Drivetrain NVH Research
- Pratt & Whitney — PW1000G Geared Turbofan Technology
- Carpenter Technology — Pyrowear 53 Aerospace Steel Datasheet
Author's Perspective
Planetary gearbox design is ultimately an exercise in constraint optimization. The same sun-planet-ring architecture serves a Tesla eAxle and a Pratt & Whitney turbofan, yet the engineering distance between the two is measured in orders of magnitude — of power, of precision, of qualification rigor. At Batom, we see firsthand how customers increasingly span multiple application domains, sourcing EV reduction gears and robotic joint components from the same manufacturing floor. Understanding how material grade, heat treatment depth, and tooth quality class shift across these domains is what separates a gear supplier from a gear engineering partner.
Batom Co., Ltd. — Marketing Department
Ready to discuss planetary gearbox requirements for your EV, robotics, or aerospace program? Schedule a consultation with Batom's engineering team to align gear design with your application's specific duty cycle.
Frequently Asked Questions
Q: What gear ratio do most electric vehicles use? A: Most production EVs use a single-speed planetary reducer with ratios between 7:1 and 10:1. Tesla Model 3/Y uses 9.03:1, while Rivian R1T/R1S uses 12.6:1. The Porsche Taycan is an exception with a two-speed system offering 15:1 and 8:1 ratios.
Q: Why are planetary gearboxes preferred over parallel-axis gearboxes? A: Planetary gearboxes offer 2–3 times higher power density per unit volume, weigh 20–40% less for the same torque capacity, and feature coaxial input/output shafts. Multiple planet gears share the load, reducing stress per tooth and enabling more compact designs.
Q: How much backlash is acceptable for robotic planetary gearboxes? A: Standard industrial robots tolerate 5–10 arcminutes of backlash. Precision assembly robots require less than 3 arcminutes. Ultra-precision applications such as medical robotics demand sub-1-arcminute backlash, often achieved through wave spring preloads and precision bearings.
Q: What makes aerospace planetary gearboxes different from industrial ones? A: Aerospace gearboxes use premium steels like Pyrowear 53 (sustained 150°C operation), require DIN 4–6 (AGMA A3–A5) surface finish grades, and must meet certification standards including DO-160G and AS9100. Safety factors of 4–6× on contact stress and MTBF targets above 100,000 flight hours set them apart from industrial designs.
Q: How efficient are planetary gearboxes? A: Single-stage planetary gearboxes achieve over 97% efficiency in EV applications and over 98% in aerospace turbofan engines. Robotics applications typically see 85–95% efficiency, lower due to smaller gear modules and tighter bearing preloads required for backlash control.