
Surgical Robot Gears: How Tooth Accuracy Impacts Precision and Patient Safety
Surgical robotics is one of the most active areas of minimally invasive medicine, with leading flagship and modular robotic platforms reportedly performing an estimated several million procedures globally each year. Behind the surgeon's steady hands and precise instrument control sits a critical component: the precision gear. These small mechanisms have to meet demanding standards of accuracy, reliability, and material compatibility. This guide explains how surgical robot gears work, why tooth accuracy matters, and how manufacturing rigor supports patient safety through engineering discipline and regulatory documentation.
The Surgical Robotics Market: Scale and Growth
The surgical robotics market has expanded substantially over the past two decades. Following early pioneering systems in the 1990s, landmark FDA approvals of comprehensive surgical-robot platforms around 2000 marked the dawn of broader clinical adoption, evolving into a multi-billion-dollar industry with competing platforms and expanding clinical applications.
Market Overview
- Global installed base: an estimated 8,000+ robotic surgical systems reported across leading platforms
- Annual procedures: estimates commonly cited around several million minimally invasive procedures per year
- Market size: industry analyst estimates have placed the market in the high single-digit billions of US dollars in recent years, with double-digit billion forecasts by the end of the decade (figures vary by analyst and methodology)
- Primary applications: prostatectomy, hysterectomy, nephrectomy, cardiac, and gynecological procedures, among others
Figures above are aggregated from publicly reported industry estimates and may vary by source, region, and reporting year.
Leading Platforms
Flagship robotic platform from a U.S. industry leader
- Among the most widely deployed surgical robotics platforms, with a leading global installed base reported in industry filings
- Several thousand systems reportedly installed across hospitals worldwide
- Cumulative procedures reported in the multiple millions over more than two decades of clinical use
- Successive generations represent ongoing refinement of the original flagship architecture
Next-generation modular system from a large medical-device incumbent
- Cleared in select regulatory geographies; clearance dates and indications vary by region
- Growing adoption in select hospital networks
- Positioned around competitive pricing, modular setup, and ergonomic console design
- Installed base expanding over time, with figures varying by reporting source
Modular European robotic system for advanced soft-tissue procedures
- Cleared in multiple regulatory geographies; specific approval dates and indications vary by region
- Modular, portable design intended to lower cost of ownership versus larger consoles
- Expanding presence across European, UK, and select Asia-Pacific markets
- Among the established surgical-robot platforms originating outside the United States
Gear Requirements for Surgical Instruments: Precision Without Compromise
Surgical robot gears operate under demanding conditions that require very tight engineering control. Unlike general industrial gears, where the design objective is often raw power transmission, surgical robot gears prioritize a different balance — though efficiency still matters, particularly in battery-driven or thermally constrained subsystems:
- In-tolerance positional accuracy: holding profile, pitch, and runout deviations inside tightly specified ISO 1328 tolerance bands rather than chasing the abstract notion of "absolute" accuracy
- Backlash control (position repeatability)
- Low transmission error and vibration, minimizing end-effector jitter and reducing the risk of unintended tissue trauma
- Material compatibility (sterilization survivability, particulate control, ISO 10993 evaluation as applicable to the contact category)
- Sterilization resistance (repeated high-temperature steam cycles and selected chemical reprocessing)
- Drivetrain efficiency (acceptable losses in motor torque and heat generation, particularly in cordless or arm-mounted drives)
ISO 1328 Gear Accuracy Framework in Surgical Robotics
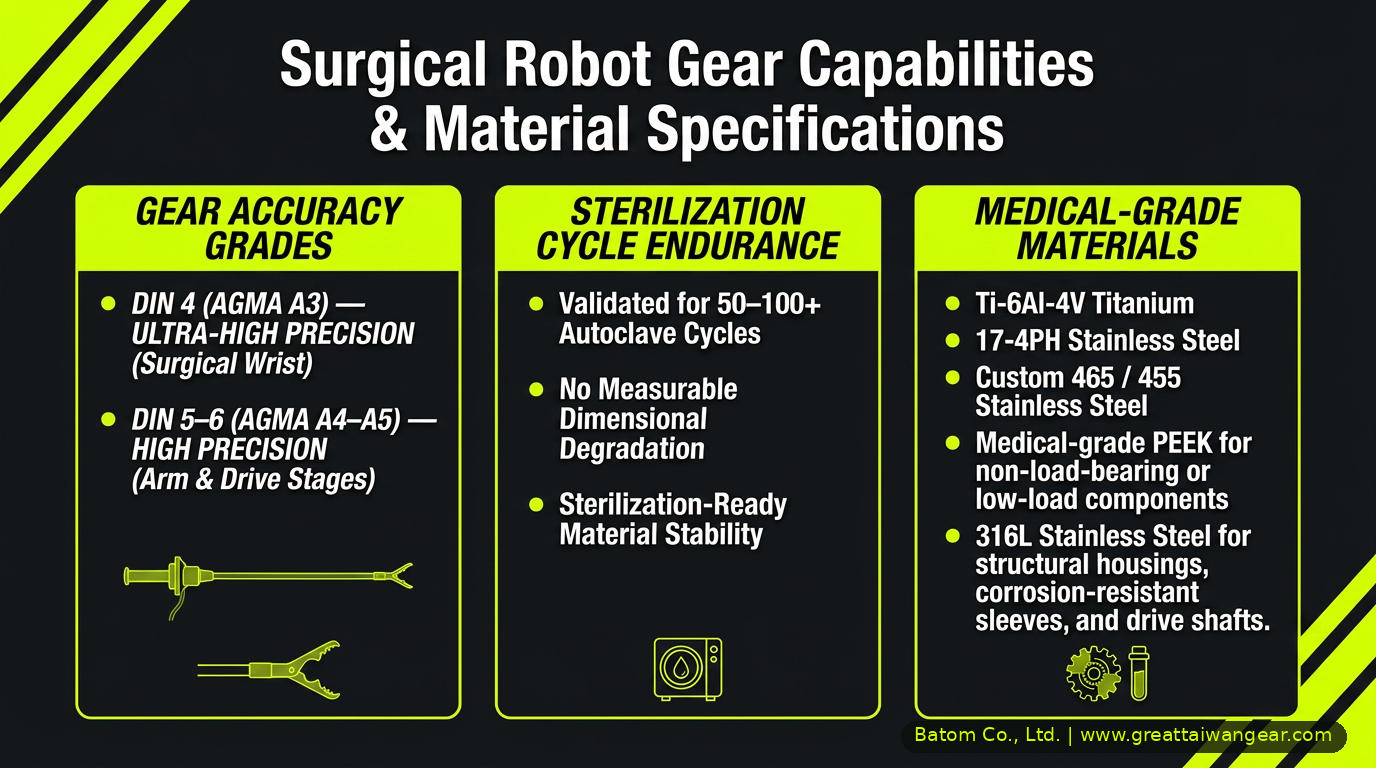
The ISO 1328 standard defines the accuracy framework for cylindrical gears. While industrial applications often rely on broader grades, some precision motion stages in surgical robots — particularly wrist articulation and master-console force-feedback mechanisms — may target the stringent tolerances of Grade 4 or Grade 5.
It is important to note that ISO 1328 tolerances are not absolute fixed values; they are dynamically calculated from the gear's module, reference diameter, and face width, so the resulting numbers shift with each design. To illustrate the level of precision involved, however, consider a typical micro-gear used in an 8 mm robotic instrument wrist:
- Ultra-tight deviations: For such miniaturized gears, a Grade 4 classification typically requires profile (Fα) and pitch (fp) deviation to be controlled within just a few micrometers.
- Runout optimization: Concentricity and runout are strictly minimized to ensure smooth, cogging-free rotation, which is vital for the continuous sweeping motions of surgical instruments.
To put this in perspective, holding single-digit micron tolerances requires manufacturing precision that is a fraction of a human hair's thickness. This level of process control is what underwrites the kinematic fidelity needed for complex surgical articulation.
Backlash Control
Backlash — the rotational free play between meshing teeth — is a primary contributor to positional uncertainty in a surgical-robot drivetrain. Allowable values vary substantially by joint location and the role that joint plays in the kinematic chain:
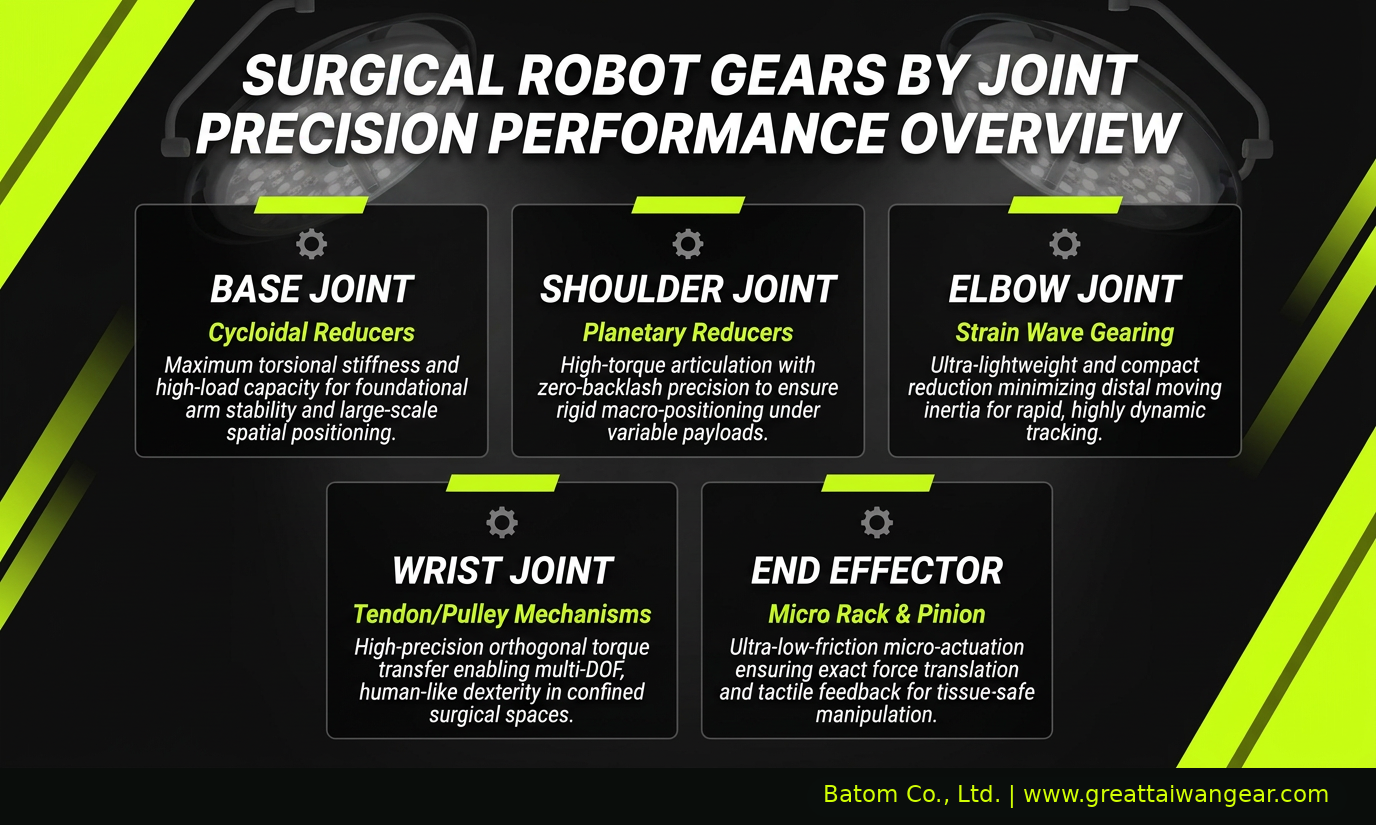
- Distal wrist articulation: typically targeted in the sub-arcminute range, with master-console interfaces optimized for low actuation friction and high back-drivability so that hand input maps closely to instrument-tip motion.
- Proximal arm joints (shoulder, elbow, base): generally tolerate looser backlash than the distal wrist, because their backlash is partially absorbed by closed-loop position control and is not directly amplified at the instrument tip.
- Drive and reduction stages between motor and joint: specified to fit within the overall instrument-tip error budget rather than to a single fixed system-wide arc-minute target.
To put any one of these targets in physical perspective: at the distal wrist, holding backlash on the order of half an arc-minute on a 10 mm-pitch-diameter gear corresponds to less than roughly 1.5 µm of radial clearance — a tolerance band that demands grinding-class manufacturing rather than as-cut hobbing.
Modern surgical systems achieve this through application-specific geometries — for example, micro-spur or micro-bevel gears for space-constrained distal wrists, and helical gears for proximal arm stages where axial thrust can be managed — combined with disciplined drivetrain engineering:
- Joint-appropriate gear types: micro-spur or micro-bevel for distal wrist articulation; helical for proximal arm stages where axial thrust is well managed
- Preload mechanisms using spring-loaded balls or parallel gear pairs to eliminate residual play
- Material selection ensuring stable dimensions under repeated sterilization cycles
- Grinding and lapping to achieve sub-micron surface finishes
Material Selection: Balancing Mechanical Performance and Medical Compliance
Unlike orthopedic implants, gears in surgical robotic systems are predominantly located within the robotic arms or the proximal housing of instrument drives. As such, they rarely have direct, prolonged contact with patient tissue. Material selection therefore needs to balance mechanical performance with appropriate medical compliance, rather than defaulting to implant-grade specifications across the board.
Sterilization Survivability
Instruments are subjected to harsh cleaning chemistries and repeated steam sterilization (autoclaving at 121-134°C). Materials such as 17-4PH precipitation-hardening stainless steel and selected cobalt-chromium alloys (including those in the ASTM F75 family) are frequently utilized by leading surgical platforms for their ability to maintain dimensional stability and surface hardness without severe oxidation across many cycles.
Typical sterilization profile:
- Steam autoclaving at 121-134°C, 2-3 bar pressure, 3-4 minute exposure
- 50-100+ cycles over the device's intended service life (e.g., 10-20 cycles for limited-use instruments, and 50-100+ cycles for reusable proximal adapters).
- Supplemental chemical sterilization (ethylene oxide, hydrogen peroxide plasma) for heat-sensitive subassemblies
Tribological Stability & Particulate Control
Preventing galling — metal-on-metal adhesive wear — is critical inside an instrument drivetrain. Beyond base-material selection, leading platforms use specialized surface treatments and the strategic deployment of high-performance medical-grade polymers (for example, specialty PEEK formulations) to reduce friction and prevent particulate generation that could otherwise compromise the instrument's sterile boundary.
Practical considerations include:
- Surface engineering (e.g., validated medical-grade DLC or PVD coatings compatible with autoclave cycles) to limit adhesive wear in steel-on-steel meshes
- Specialized polymers may be used selectively in non-sterilized proximal drives to reduce vibration, whereas sterilizable distal assemblies should favor monolithic metallic gear architectures for dimensional stability under repeated autoclave cycles
- Lubricant selection compatible with steam sterilization and the device's biocompatibility profile
- Particulate testing under simulated lifecycle conditions to verify that wear debris remains within validated limits
Contextual Biocompatibility (ISO 10993)
The extent of ISO 10993 biocompatibility testing depends entirely on the device's contact profile. For internally sealed drivetrain components without direct or indirect patient contact, they generally fall outside the direct testing scope of ISO 10993. The regulatory focus instead relies on validating the instrument's sterile boundary and ensuring component cleanliness to prevent any migration of particulate debris. Common considerations include:
- Material compatibility: confirming that base materials, surface treatments, and lubricants are compatible with each other and with the cleaning and sterilization chemistries used in the field
- Cleaning and sterilization resistance: validating that repeated reprocessing does not introduce corrosion, leachables, or dimensional drift outside specification
- ISO 10993-based evaluation as applicable: scaling the biological-evaluation file to the actual contact category of the component (for example, sealed internal components vs. surfaces with limited indirect patient contact)
Leading surgical platforms frequently utilize materials such as 17-4PH precipitation-hardening stainless steel, ASTM F75-class cobalt-chromium alloys, and medical-grade PEEK formulations for the components in their instrument drivetrains. The specific allocation of materials to mechanisms — wrist articulation, suture drives, master-console feedback stages, and so on — varies by manufacturer and is rarely disclosed in detail; the underlying engineering decision is always driven by the contact profile, sterilization cycle, and tribological requirements of the specific stage.
How Tooth Accuracy Translates to Surgical Precision
The path from gear tooth accuracy to instrument-tip behavior is mechanical and traceable. Understanding this transmission chain — and its limits — is important for procurement engineers and device manufacturers, while keeping in mind that ultimate clinical outcomes also depend on surgeon technique, patient anatomy, and many other factors.
Precision Transmission Chain
Wrist Mechanism (illustrative example)
- Surgeon's hand motion captured by console controls
- Surgeon motions are scaled by system kinematic algorithms and precisely tracked through high-resolution joint encoders
- Transmitted through drive shafts to instrument wrist
- Wrist gearbox translates motor speed to instrument articulation
- Backlash in gearbox directly translates to hand/instrument mismatch
Example Failure Mode:
- Even small wrist gearbox backlash can be amplified at the distal tip, potentially affecting sub-millimeter surgical accuracy
- Insufficient kinematic fidelity in the wrist drivetrain may translate hand input imperfectly to instrument-tip motion
- Result: instrument movement may exceed the surgical-field precision budget defined by the OEM's error allocation
How Kinematic Fidelity Elevates Surgical Execution
Overall clinical outcomes are inherently multi-factorial, shaped by the surgeon's technique, the patient's anatomy, the broader clinical context, and many other variables. The mechanical precision of a robotic drivetrain therefore should not be over-claimed as a direct driver of patient outcomes. What it does directly dictate is the system's kinematic fidelity — a critical factor in the surgeon's ability to perform delicate tasks safely and effectively.
Precision gears influence surgical execution in several quantifiable ways:
- Minimizing hysteresis and backlash: In demanding procedures such as nerve-sparing prostatectomy or micro-suturing, even sub-millimeter instrument-tip deflection can compromise a step. Ultra-precision gears minimize backlash so that hand movements at the console translate with near-instantaneous response to the instrument tip, significantly minimizing mechanical hysteresis and "dead zones."
- Reducing motion artifacts: High-quality tooth profiles reduce transmission error, which mitigates vibration and mechanical noise. Smoother actuation supports more predictable instrument behavior over long cases and reduces the cognitive load on the surgeon, who relies on consistent feel to operate at anatomical margins.
- Lifecycle predictability: Tighter manufacturing tolerances reduce uneven wear during operation and across repeated high-temperature sterilization cycles. This dimensional stability helps the instrument maintain its operational accuracy throughout its intended clinical lifecycle.
Ultimately, high-precision gears do not treat the patient directly. What they do is remove mechanical uncertainty from the equation: by ensuring faithful motion transmission, they let the surgeon operate with maximum confidence and precision at the anatomical margins.
Testing and Validation: Ensuring Reliability
Surgical robot gears undergo extensive testing to ensure patient safety and regulatory compliance.
Pre-Production Testing
Gear Tooth Profile Inspection
- High-density continuous scanning and topological measurement using dedicated CNC gear metrology systems such as Klingelnberg P26 and P40
- First Article Inspection (FAI) comprehensive layout to verify drawing conformance and establish baseline process control prior to PPAP and mass production capability studies
- Statistical process control (SPC) deployed once production is stabilized, with capability indices (Cpk) tracked on critical-to-function characteristics
Material Verification
- Chemical composition verification (via OES or XRF analysis)
- Hardness testing (Micro-Vickers, Knoop) for precise case depth and surface evaluation on micro-gears
- Microstructural and grain size verification via advanced optical microscopy and phase analysis
- Gear tooth fatigue strength validation (e.g., Single Tooth Bending Fatigue testing) or material coupon testing
Functional Testing
- Backlash measurement under load and no-load conditions
- Single-flank and double-flank composite testing to verify tooth-to-tooth action, total composite error, and transmission consistency
- Noise and vibration analysis
- Thermal stability testing through sterilization cycles
Validation Tiers: From Bench to Clinic
Validation activities for a surgical robotic system are layered, and the distinctions between them matter — both for regulatory submissions and for accurately representing what the data actually shows. Cadaveric work, simulated-use studies, and human clinical trials are not interchangeable; each addresses a different question.
Preclinical / Simulated-Use Testing (non-human, before any patient exposure)
- Bench-top simulators replicating surgical loads, motion profiles, and reprocessing cycles
- Cadaveric (anatomical) models — categorized as preclinical / simulated-use research, not human clinical research
- Animal-model studies where appropriate to the device and indication
- Procedure simulation across representative indications (e.g., prostatectomy, hysterectomy, cardiac access)
- Documentation of gear performance, failure modes, and reprocessing behavior under simulated use
Clinical Investigations (human subjects, conducted under IRB/ethics oversight)
- Early feasibility / first-in-human studies confirming safety and basic feasibility (typically small cohorts)
- Pivotal studies establishing effectiveness for the intended use (typically larger, multi-site cohorts)
- Adverse-event monitoring and reporting per the applicable regulatory framework
- Cohort sizes and study designs vary substantially by jurisdiction, indication, and predicate strategy
Post-Market Surveillance
- Real-world performance and complication monitoring once the system is on the market
- Failure analysis and root-cause investigation feeding back into design controls
- Design iterations and field-action management
- Supporting the OEM's post-market surveillance with rapid traceability data, complaint investigation support, and root-cause analysis for their regulatory reporting obligations
Navigating Regulatory Requirements: How Component Quality Supports System Clearance
Bringing a complex surgical robotic system to market — whether through the FDA's 510(k) pathway (establishing substantial equivalence) or the De Novo process for novel system classifications — requires exhaustive documentation of system-level safety and effectiveness. Equivalent national or regional frameworks (for example, the EU MDR in Europe, PMDA in Japan, or NMPA in China) impose their own variations of the same underlying expectations.
It is important to understand that regulatory bodies evaluate the entire medical device system, not individual gears in isolation. However, a capable precision-gear manufacturer plays an indispensable supporting role in the OEM's regulatory submission and ongoing compliance:
Supporting Design Controls (21 CFR Part 820.30)
Under FDA Quality System Regulation and ISO 13485, OEMs are required to verify that every component meets defined design inputs. A premium gear supplier provides the verification data that makes this verification credible:
- CMM-based dimensional inspection reports tied to specific drawings and revision levels
- Process capability analyses (Cpk) on critical-to-function characteristics
- Material certificates, heat-treatment records, and surface-finish measurements
- Documentation packages structured to support the OEM's Device History Record (DHR) and Design History File (DHF)
End-to-End Traceability
Complete lot traceability — from raw-material mill certificates and heat-treatment logs through final dimensional inspection — is mandatory for medical-device drivetrain components. Robust record-keeping supports:
- Risk management activities under ISO 14971
- Post-market surveillance and complaint investigation
- Root-cause analysis when field issues arise
- Regulator-driven inquiries and audits across multiple jurisdictions
De-risking Design and Clinical Validation
By operating a rigorous Quality Management System (QMS) and consistently controlling its manufacturing processes, a capable gear supplier helps the OEM remove mechanical variability from the system equation. That, in turn, supports cleaner preclinical and clinical validation campaigns:
- Predictable mechanical performance lot-over-lot, so clinical signal is not confounded by drivetrain variation
- Reliable behavior across reprocessing cycles, supporting reusable-instrument lifecycle claims
- Clear documentation chains that simplify the OEM's regulatory questions and responses
How Batom Supports OEM Submissions
For surgical-robot OEMs working through 510(k), De Novo, or international equivalents, Batom Co., Ltd. operates as a precision-gear partner — not as a regulatory submitter. Our scope includes precision manufacturing, supplier qualification, dimensional and process documentation, traceability, and reprocessing-aware material selection. The OEM remains the legal manufacturer and submission holder; our role is to make sure that, on the component side of the file, the data is comprehensive, consistent, and audit-ready.
Failure Mode Consequences: Why Precision Matters
Failure in surgical robot gears can have serious consequences. Understanding failure modes is critical for designing and manufacturing safe systems.
Mechanical Failure Modes
Tooth Breakage
- Cause: Overload, material defect, fatigue
- Symptoms: Sudden loss of articulation, visual tracking mismatch, or safety interlock activation caused by position-encoder discrepancies
- Impact: Impact: Loss of intended kinematic function or activation of safety interlocks
- Patient risk: Unintended contact, trauma
Galling and Seizure
- Cause: Inadequate lubrication, corrosion, material incompatibility
- Symptoms: Increasing friction, stiffness, eventual lock
- Impact: Partial or complete loss of articulation
- Patient risk: Inability to perform procedure, extended operative time
Excessive Backlash Development
- Cause: Wear, inadequate material, improper manufacturing
- Symptoms: Play in instrument response, lack of repeatability
- Impact: Degraded precision, poor hand-eye coordination
- Patient risk: Increased tissue trauma, margin violations
Material & Sterilization Failure Modes
Because gears in surgical robotic systems sit inside the instrument or arm housing rather than in direct, prolonged tissue contact, the dominant material-related concerns are dimensional and tribological rather than implant-grade biocompatibility:
Material Degradation
- Cause: Repeated steam sterilization, cleaning chemistries, and electrochemical corrosion in moist environments
- Symptoms: Discoloration, particulate shedding, dimensional drift outside specification
- Impact: Altered mechanical properties, increased friction, and reduced tolerance margin in the drivetrain
- Risk to use: Loss of dimensional stability and potential migration of wear debris within the sealed mechanism
Particulate Shedding & Sterile-Boundary Concerns
- Cause: Adhesive wear (galling), surface-treatment breakdown, lubricant degradation
- Symptoms: Detectable wear debris within the instrument housing, increased running friction
- Impact: Compromised tribological performance and, in the worst case, breach of the instrument's sterile boundary
- Mitigation: Surface engineering, validated lubricants, particulate testing under simulated lifecycle and reprocessing conditions, and ISO 10993-based evaluation scaled to the component's actual contact category
Quality Assurance in Surgical Robot Gear Manufacturing
Manufacturers of surgical robot gears implement rigorous quality systems to prevent failures and ensure patient safety.
Manufacturing Process Control
Material Receiving
- Mill certificates verification
- Chemical composition verification (via OES or XRF analysis)
- Mechanical property verification (hardness, tensile testing)
- Batch traceability documentation
Machining Operations
- CNC tool offsets validated daily
- Dynamic in-process inspection intervals dictated by validated Control Plans and Statistical Process Control (SPC) data
- Surface finish verification
- Thermal Processing: Stress relief monitoring to ensure dimensional stability after heat treatment
Heat Treatment
- Heat treatment process control for precipitation-hardening stainless alloys such as 17-4PH, focused on aging parameters, temperature uniformity, and post-process dimensional stability
- Temperature logging (continuous chart recorder or digital)
- Atmosphere and time-at-temperature control validated against the aging schedule for the specific alloy condition (e.g., H900, H1025)
- Hardness verification across the gear tooth profile
Grinding and Finishing
- Grinding wheel selection and dressing schedule
- Geometric accuracy verification (CMM or gear checker)
- Surface finish measurement (Ra value, roughness profile)
- Final cleanliness verification (particle counting)
Documentation and Traceability
Each surgical robot gear is accompanied by:
- Certificate of Conformance (CoC): Material and mechanical properties
- Test Data Report (TDR): Inspection and test results
- Dimensional Inspection Report: Profile, pitch, runout data
- Material Certification: Mill certificates confirming alloy specifications and process compliance statements including the strict avoidance of animal-derived additives (TSE/BSE-free compliance) and specific cytotoxic cutting fluids.
- Material Traceability: Raw material lot numbers through finished part
Case Studies: Precision in Practice
Case Study 1: Robotic Prostatectomy with a Leading U.S. Platform
Scenario:
- 68-year-old male with localized prostate cancer
- Intermediate risk, strict negative surgical margin goal
- Robotic prostatectomy performed
Gear Performance Requirements:
- Wrist gearbox backlash: Ultra-low backlash requirements achieved
- Instrument tip precision: Supports sub-millimeter surgical kinematic fidelity
- Articulation smoothness: No binding or hesitation
Outcome:
- Negative surgical margins achieved
- No intraoperative complications
- Demonstrated meaningful reductions in estimated blood loss and hospital stay duration compared to traditional open procedures, subject to clinical validation and applicable regulatory approvals
Gear Contribution (mechanical role only): Outcomes in oncologic prostate surgery depend on multiple factors — surgeon experience, anatomy, tumor biology, and intraoperative judgment. From a purely mechanical standpoint, tightly controlled drivetrain backlash supports predictable instrument-tip behavior in confined pelvic anatomy, which is one of several enabling factors that allow the surgeon to operate with confidence at narrow dissection planes.
Case Study 2: Robotic Mitral Valve Repair with a Next-Generation Modular System
Scenario:
- 52-year-old female with mitral valve regurgitation
- Minimally invasive repair indicated
- Robotic mitral repair performed
Gear Performance Requirements:
- Cardiac instrument precision: Supports sub-millimeter kinematic fidelity for delicate cardiac tissue manipulation.
- Suturing gearbox accuracy: High-precision compliance (e.g., ISO 1328 Grade 4-5) optimizing positional repeatability.
- Tactile feedback transmission: Minimized mechanical hysteresis ensuring near-instantaneous tactile response.
Outcome:
- Successful valve repair without conversion to open surgery
- Consistent suture placement with predictable instrument-tip behavior
- Operative time consistent with minimally invasive robotic norms, with reductions observed versus traditional open procedures subject to clinical validation
- No valve insufficiency on follow-up echo
Gear Contribution (mechanical role only): Cardiac repair outcomes are driven by the surgeon's technique, the patient's anatomy and disease state, perfusion strategy, and many other variables. The drivetrain side of the equation contributes by minimizing backlash and transmission error in the suturing mechanism, supporting consistent instrument-tip behavior so the surgeon can place sutures with predictable feel and motion in tight working spaces.
Frequently Asked Questions
Q1: What is the difference between ISO 1328 Grade 4 and Grade 5 precision in surgical applications?
A: Grade 4 represents tighter tooth-profile, pitch, and runout tolerance bands than Grade 5 under the ISO 1328 framework, which minimizes transmission error and optimizes kinematic smoothness. This geometric consistency allows the system to operate reliably at ultra-low backlash settings without binding or cogging. Whether a given joint actually needs Grade 4 versus Grade 5 depends on the kinematic role of that joint, the broader transmission design, and the OEM's instrument-tip error budget — there is no single "right" grade for "most" surgical applications. Cost impact is similarly design-dependent: it is shaped by batch size, base material, module, finishing route, and inspection regime, so a fixed percentage difference between Grade 4 and Grade 5 for any given part is not meaningful in the abstract.
Q2: Can surgical robot gears be repaired or must they be replaced after failure?
A: In the majority of surgical robotic platforms, gears are not field-repairable. Many wrist instruments are designed as disposable or limited-use assemblies, so when they reach end-of-life or fail, the entire instrument is replaced rather than the individual gear. For reusable arm-side mechanisms, replacement is typically executed via Field Replaceable Units (FRUs) by certified Field Service Engineers directly on-site to minimize hospital downtime, with the system re-calibrated as part of the service procedure. Pricing of replacement instruments and service is set by each system OEM and varies by region and contract — those figures are not publicly comparable and we do not list them here. The practical takeaway is that preventive maintenance, careful reprocessing, and high component quality at the manufacturing stage materially reduce the frequency and cost of replacements over the device's service life.
Q3: How does sterilization affect gear performance over time?
A: Repeated sterilization cycles primarily challenge surface condition, corrosion resistance, dimensional stability, and the durability of any polymer-based subcomponents. Advanced alloys such as 17-4PH precipitation-hardening stainless steel are expected to maintain their core hardness and structural integrity under properly validated sterilization protocols. This is why surgical systems define service life intervals and why manufacturers conduct sterilization-cycle qualification testing during development to confirm that mechanical and surface performance remain within specification across the device's intended service life.
Q4: What standards govern the biocompatibility testing of surgical robot materials?
A: ISO 10993-1 provides the system-level biocompatibility assessment framework, with specific tests dictated by material and contact type at the finished-device level. Direct biocompatibility testing is generally not required for sealed internal gears. Instead, component suppliers should provide material traceability, certified alloy documentation, and validated cleaning controls to support the OEM's overall biocompatibility assessment.
Q5: How do manufacturers validate that gear accuracy improvements translate to better surgical outcomes?
A: Validation occurs through a multi-level approach: (1) Bench testing demonstrating mechanical improvements, (2) Preclinical testing using cadaveric models and surgical simulation, (3) Clinical trials validating the entire system's overall safety and efficacy in live procedures, supported by appropriate preclinical and bench testing, and (4) Post-market surveillance analyzing complication rates and revision surgeries. FDA requires demonstration of substantial equivalence or a reasonable assurance of safety and effectiveness before new designs can be cleared or granted marketing authorization.
Partner With Batom
Surgical robot manufacturers face immense responsibility to ensure patient safety through precision engineering. Batom Co., Ltd. offers complete in-house manufacturing capabilities — we are the direct design and production source for medical-grade precision gears.
Whether you're developing a new surgical robot platform or optimizing existing instrument designs, our in-house engineering and manufacturing team delivers:
- In-house design and manufacturing for medical-grade precision gears
- Material qualification, traceability, and sterilization-aware engineering
- Full dimensional and process documentation aligned with ISO 13485 expectations
- Audit-ready quality records to support our OEMs' regulatory submissions
- Cost-efficient precision manufacturing without compromising safety
Start your surgical robotics manufacturing partnership today: Contact us
Batom Co., Ltd. is Batom Co., Ltd. is a leading precision gear manufacturer with fully integrated in-house production capabilities, serving surgical robotics, aerospace, and medical device OEMs. With over 40 years of expertise in precision gear design and production, Batom controls every stage from DFM engineering through final grinding inside its own facilities.
